-

Wykorzystanie dronów w badaniach powietrza - Wprowadzenie -
System pomiarowy wykorzystujący DRON do pomiaru punktowego gazów autorstwa Villa i in. -
System do badania zanieczyszczeń powietrza Scentroid DR 1000 i inne -
System wykorzystania DRONÓW w BHP opracowany w CIOP-PIB -
Opis systemu wykorzystania DRONÓW w BHP opracowanego w CIOP-PIB -
Weryfikacja systemu wykorzystania DRONÓW w BHP w warunkach poligonowych -
Automatyczna kontrola lotu DRONA na podstawie gradientu stężeń substancji chemicznych -
Bibliografia

Weryfikacja systemu wykorzystania DRONÓW w BHP w warunkach poligonowych
Konfiguracja UAV opisana na poprzedniej stronie została przebadana w czasie lotów nad poligonem SGSP (zaplanowaną trajektorię lotu przedstawia rys. 6). W przeciwieństwie do badań laboratoryjnych badania poligonowe umożliwiły wykonanie testów całości systemu, gdyż zaprogramowany lot odbywał się nad poligonem, na którego terenie umieszczone było źródło węglowodorów (etylina w otwartym zbiorniku).
Rys. 6. Trajektoria lotu UAV zaplanowana do testów
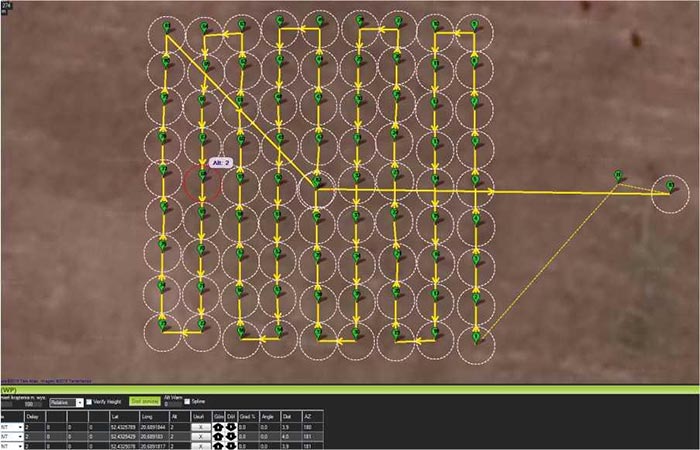
Korzystając z wyników testów przeprowadzonych na poligonie w kwietniu 2019 roku, wykorzystano w badaniach zmodyfikowaną wersję oprogramowania Mission Planner (fot. 10). Zmiany dotyczyły m.in. wyświetlania danych pomiarowych w czasie rzeczywistym oraz przesyłania własnych komunikatów, w tym poleceń o zmianie trasy lotu, co ewentualnie mogłoby umożliwić pracę UAV w trybie autonomicznym, czyli automatyczne reagowanie zmianą trajektorii lotu w zależności od aktualnych pomiarów stężeń wybranych substancji chemicznych.
 Fot. 10. Okno programu Mission Planer w trakcie lotu nad poligonem SGSP; najwyższe stężenia są rejestrowane na ramieniu UAV z lewej strony
Fot. 10. Okno programu Mission Planer w trakcie lotu nad poligonem SGSP; najwyższe stężenia są rejestrowane na ramieniu UAV z lewej strony
Lot UAV odbywał się nad poligonem wzdłuż wybranych wartości długości geograficznej. Po dotarciu do krańca wyznaczonej do testów przestrzeni na poligonie, UAV przesuwał się na kolejną długość geograficzną i wracał, co ilustruje rysunek 7. W czasie takiego lotu zmieniała się przede wszystkim szerokość geograficzna, dlatego dane można przedstawić najlepiej w funkcji szerokości geograficznej (rys. 8) lub funkcji czasu (rys. 9).
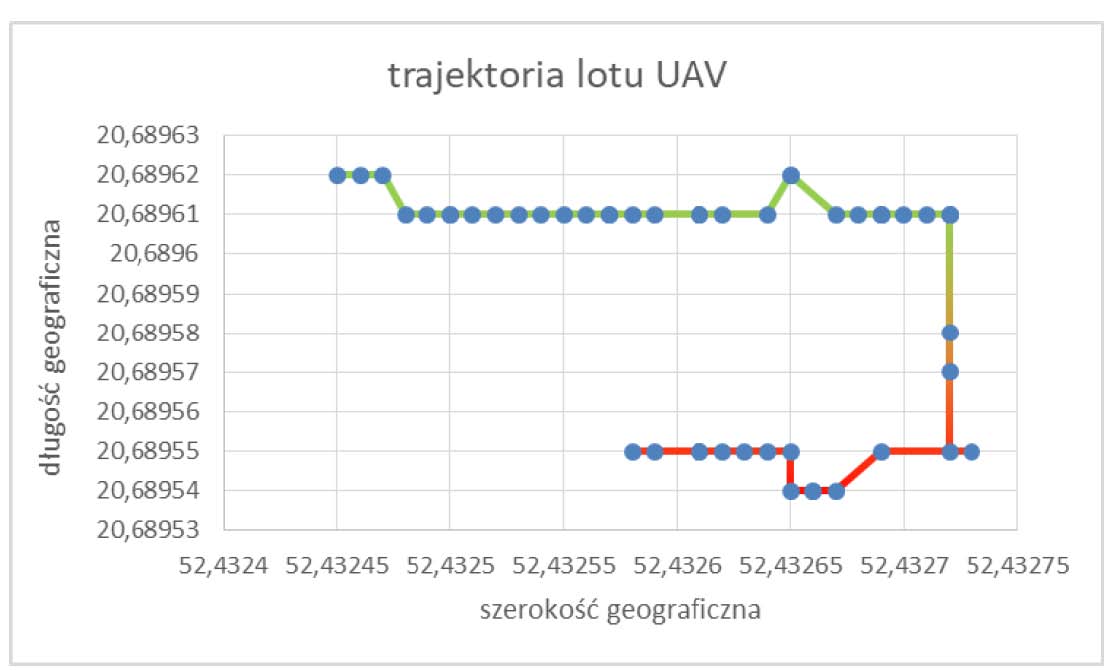
Rys. 7. Współrzędne geograficzne lotu (długość w funkcji szerokości geograficznej); wykres przedstawia wyniki dla lotu wzdłuż wybranej, a następnie powrót na innej długości geograficznej; na wykresie widoczne są niedokładności pomiarów bazujących na sygnale GPS, zaś kolor zielony oznacza początek, a czerwony koniec lotu
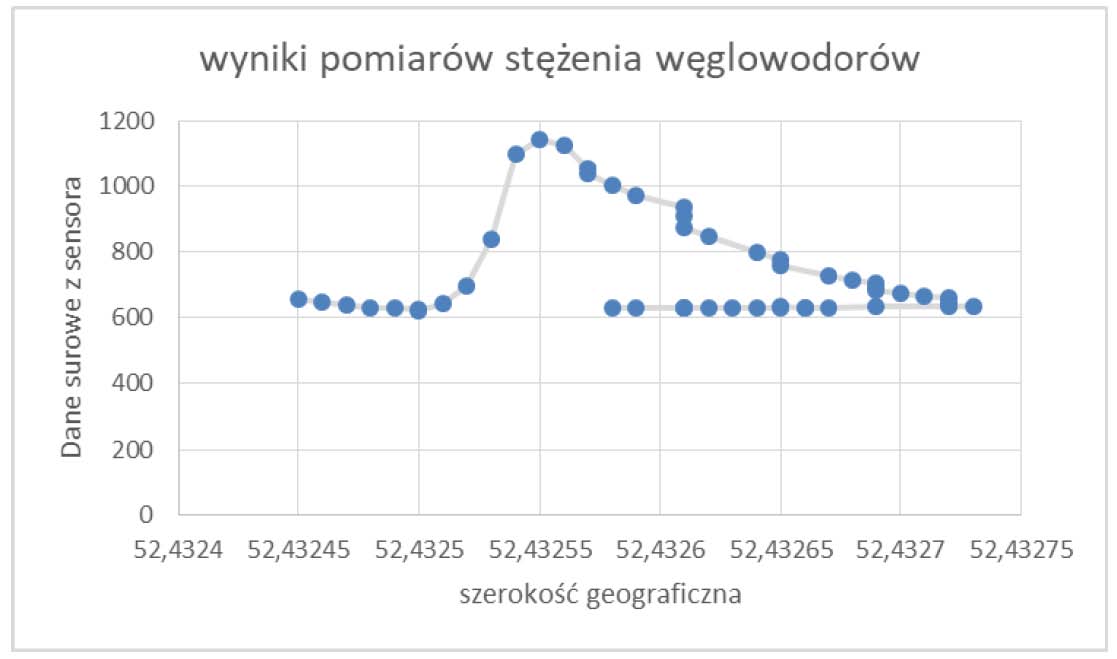
Rys. 8. Fragment wyników pomiarów zrealizowanych w trakcie lotu nad poligonem SGSP: dane surowe z sensora (zależne od stężenia węglowodorów w powietrzu) w funkcji szerokości geograficznej; wykres przedstawia wyniki dla lotu wzdłuż wybranej wartości długości geograficznej, a następnie powrót na innej długości geograficznej
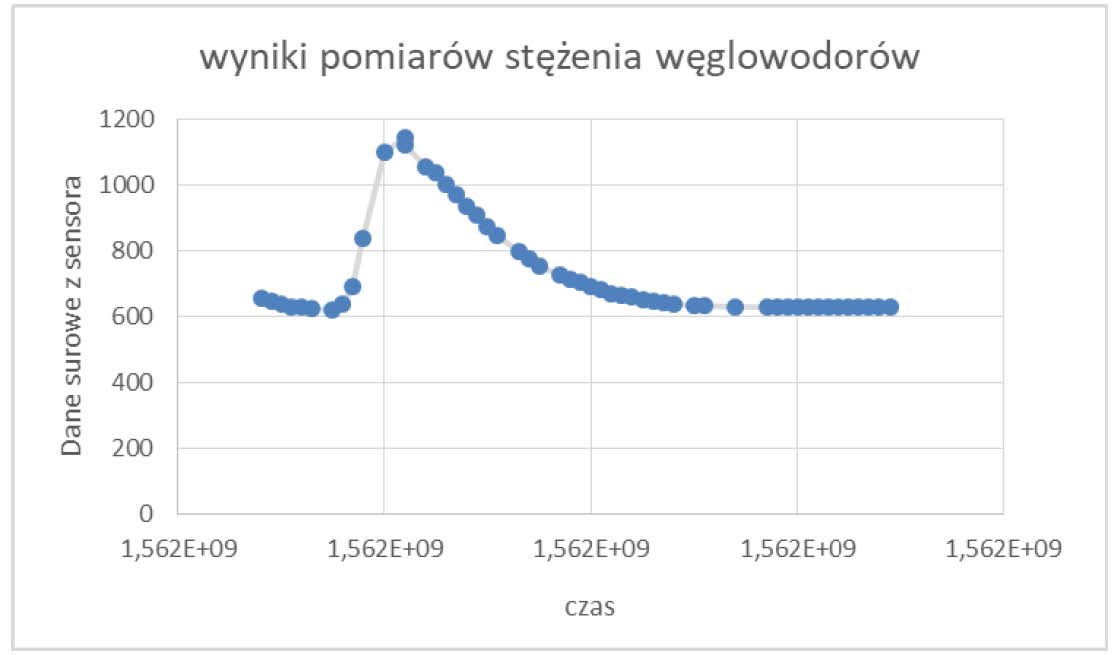
Rys. 9. Fragment wyników pomiarów zrealizowanych w trakcie lotu nad poligonem SGSP: dane surowe z sensora (zależne od stężenia węglowodorów w powietrzu) w funkcji sygnatury czasowej pakietu danych; wykres przedstawia wyniki dla lotu wzdłuż wybranej, a następnie powrót na innej długości geograficznej
Powyższe wykresy zawierają wyniki z wyłączeniem błędnie przesłanych pakietów danych (np. z wartością ujemną, zerową lub poza skalą). Wyniki badań na poligonie pokazały, że w warunkach rzeczywistych występują duże trudności w uzyskaniu satysfakcjonującej niezawodności systemu. Najwięcej problemów było związanych z transmisją danych pomiarowych drogą bezprzewodową do komputera klasy PC. Znaczna część pakietów nie docierała w ogóle lub w nieodpowiednim momencie. Wystąpiły też problemy z synchronizacją danych pochodzących z różnych źródeł, zwłaszcza danych o lokalizacji UAV z danymi z sensorów stężeń wybranych substancji chemicznych. Okazało się również, że dodatkowe układy elektroniczne wprowadzają opóźnienia, z którymi nie radzi sobie oprogramowanie autopilota. Często pojawiały się problemy z przesłaniem danych o nowej trasie lotu, nawet w sytuacji, gdy dron nie był w trakcie lotu. Problemy te starano się rozwiązać poprzez zmianę konfiguracji sprzętowej UAV oraz wprowadzenie znaczących zmian do oprogramowania.
Pomimo występujących trudności zebrane dane – po usunięciu artefaktów i szumów – wykazują działanie sensorów zgodne z tym zaobserwowanym w laboratorium. Początkowo niskie wskazania sensorów gwałtownie rosną, gdy UAV wlatuje nad obszar, gdzie znajduje się źródło węglowodorów. Następnie wartości pomiarowe powoli spadają po tym, jak UAV opuszcza strefę, gdzie stężenie węglowodorów jest wysokie. Gdy UAV dociera do krańca poligonu, uzyskiwane wartości wracają do poziomu podstawowego. Zawraca on w momencie, gdy zainstalowane na nim sensory są całkowicie „odtrute” i gotowe do wykonania kolejnej serii pomiarów.
|
|
|
|
|
|
|
|