-

Wykorzystanie dronów w badaniach powietrza - Wprowadzenie -
System pomiarowy wykorzystujący DRON do pomiaru punktowego gazów autorstwa Villa i in. -
System do badania zanieczyszczeń powietrza Scentroid DR 1000 i inne -
System wykorzystania DRONÓW w BHP opracowany w CIOP-PIB -
Opis systemu wykorzystania DRONÓW w BHP opracowanego w CIOP-PIB -
Weryfikacja systemu wykorzystania DRONÓW w BHP w warunkach poligonowych -
Automatyczna kontrola lotu DRONA na podstawie gradientu stężeń substancji chemicznych -
Bibliografia

System wykorzystania DRONÓW w BHP opracowany w CIOP-PIB
Celem projektu jest określenie potencjalnego zakresu wykorzystania technologii teleinformatycznych, mobilnych czujników oraz bezzałogowych pojazdów latających - DRONÓW - do wspomagania monitorowania bezpieczeństwa i ochrony pracy na obszarach, gdzie mogą pojawić się szkodliwe substancje, ze szczególnym uwzględnieniem bezpieczeństwa pracowników i innych osób narażonych na oddziaływanie szkodliwych substancji lotnych uwalnianych w sposób niekontrolowany. W szczególności dotyczy to składowania i transportu paliw płynnych oraz lotnych.
W pierwszym etapie projektu określono – w powiązaniu z krajowymi przepisami dotyczącymi użytkowania dronów – zakres niezbędnej funkcjonalności systemu wspomagania monitorowania zagrożeń mogących pojawić się na skutek niekontrolowanego uwolnienia szkodliwych substancji niebezpiecznych. Opracowano wstępny projekt systemu oraz metody jego badania. Przeprowadzono analizę statystyczną interwencji Państwowej Straży Pożarnej (PSP) w zakresie działań z substancjami niebezpiecznymi. Analiza danych statystycznych obejmowała zakres zdarzeń ratownictwa chemicznego i ekologicznego oraz uwzględniała podział na rodzaj zdarzenia, charakter, miejsce i wielkość zdarzenia oraz zarejestrowane niebezpieczne substancje.
W drugim etapie projektu wybrano komponenty części sprzętowej systemu pomiarowego oraz zbudowano bezzałogowy statek latający UAV (Unamanned Aerial Vehicle) typu hexacopter, który jest nośnikiem zestawu sensorów wybranych substancji chemicznych (rys. 1). Na każdym z sześciu ramion UAV znajduje się głowica z trzema sensorami różnych węglowodorów, gdyż – jak wynika z przeprowadzonej analizy danych statystycznych – tego typu substancje występują najczęściej w czasie działań ratowniczych prowadzonych przez PSP. Dlatego też tego typu substancje chemiczne zostały wybrane dla demonstratora opracowywanego system, choć jego funkcjonowanie można łatwo dostosować do innych potrzeb poprzez wymianę głowic pomiarowych. Sensory zamocowane są na teleskopowych rurkach, możliwie jak najdalej odsunięte od zaśmigłowego strumienia powietrza. Ponadto ze względu na stosunkowo długi czas reakcji sensorów zaproponowane rozwiązanie sprzętowe umożliwia lot UAV w kierunku najwyższego stężenia wybranej substancji chemicznej – w kierunku źródła wycieku. Kierunek wybierany jest na podstawie porównania pomiarów pobranych z sensorów zamocowanych na różnych ramionach. Do osiągnięcia celów projektu niezbędne było również zaprojektowanie i oprogramowanie dedykowanych układów elektronicznych, które umożliwiają przesłanie w czasie rzeczywistym danych pomiarowych drogą bezprzewodową w celu ich interpretacji i archiwizacji do ewentualnej dalszej analizy i oceny.
Dane pomiarowe wraz z informacjami o locie i wysokości UAV przesyłane są za pośrednictwem odpowiedniego interfejsu programowania aplikacji (API) do teleinformatycznego narzędzia wspomagającego archiwizację i zarządzanie posiadanymi zasobami. Użytkownicy mogą łączyć się z tym narzędziem za pomocą przeglądarki internetowej, a także poprzez urządzenia przenośne (np. smartfony). W aktualnej wersji oprogramowanie w formie serwisu WWW posiada następujące komponenty:
- Moduł logowania
- Moduł zarządzania użytkownikami
- Moduł zarządzania sprzętem (wyróżniono 3 typy urządzeń: UGV, UAV, Mobilne
Centrum Dowodzenia) - Moduł zarządzania ratownikami
- Moduł zarządzania prowadzonymi działaniami ratowniczymi
- Moduł mapy
- Moduł zarządzania mapami.
Przeprowadzono również badania wybranych czujników substancji chemicznych oraz próby terenowe lotu UAV na poligonie we współpracy ze Szkołą Główną Służby Pożarniczej (SGSP). Na podstawie analizy wyników testów wprowadzono zmiany w konstrukcji UAV, np. dodano ultradźwiękowy czujnik wysokości oraz rozpoczęto prace nad zmianą systemu transmisji danych zarówno w części sprzętowej, jak i programowej. Najważniejsza modyfikacja związana jest z koniecznością usunięcia modułu separującego dane z autopilota od danych pomiarowych, gdyż wprowadzał on zbyt duże opóźnienia, co negatywnie wpływało na sterowanie trajektorią lotu UAV.
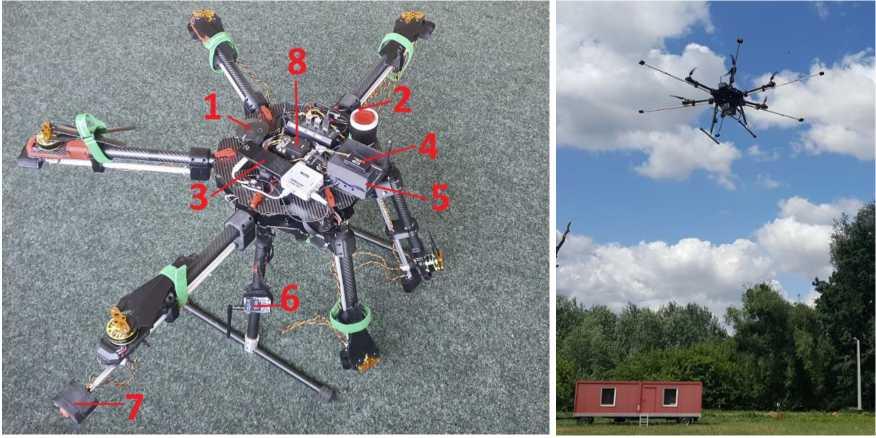
W trzecim etapie prowadzono intensywne testy opracowanego sprzętu i oprogramowania w warunkach laboratoryjnych i poligonowych, w szczególności na poligonie SGSP (fot. 8). Efekty testów i badań wykorzystywano do modyfikacji i usprawniania pracy UAV i transmisji danych pomiarowych. Przygotowano i przetestowano kilka iteracji różnych rozwiązań sprzętowych, aż osiągnięto zakładany efekt działania UAV. Wersję ostateczną z wyróżnionymi głównymi modułami przedstawia fotografia 8a, a fotografia 8b testy przeprowadzone na poligonie SGSP.
| a) | b) |
Fot. 8. Bezzałogowy statek latający (UAV) ze złożonymi i rozłożonymi ramionami. 1 – moduł GPS, 2 – czujnik odległości, 3 – komputer pokładowy podłączony do przetwornika zamieniającego sygnał cyfrowy ze złącza HDMI na sygnał analogowy, 4 – moduł telemetrii do transmisji danych pomiarowych, 5 – układy elektroniczne agregujące i przetwarzające dane pomiarowe, 6 – moduł transmisji obrazu z kamery IR lub obrazu z wyjścia komputera pokładowego, 7 – moduł z trzema czujnikami gazów, 8 – autopilot sterujący lotem UAV
|
|
|
|
|
|
|
|