-

Wykorzystanie dronów w badaniach powietrza - Wprowadzenie -
System pomiarowy wykorzystujący DRON do pomiaru punktowego gazów autorstwa Villa i in. -
System do badania zanieczyszczeń powietrza Scentroid DR 1000 i inne -
System wykorzystania DRONÓW w BHP opracowany w CIOP-PIB -
Opis systemu wykorzystania DRONÓW w BHP opracowanego w CIOP-PIB -
Weryfikacja systemu wykorzystania DRONÓW w BHP w warunkach poligonowych -
Automatyczna kontrola lotu DRONA na podstawie gradientu stężeń substancji chemicznych -
Bibliografia

System do badania zanieczyszczeń powietrza Scentroid DR 1000 i inne
System pomiarowy Scentroid DR1000 [7] składa się z laboratorium umieszczonego na dronie. Posiada zdolność pomiaru zanieczyszczeń chemicznych, dymów przemysłowych i innych w czasie rzeczywistym. W dronie można zaprogramować domyślne ścieżki pomiaru i poboru próbek lub zdefiniować je zgodnie z zaistniałą potrzebą. Dron wyposażony w odpowiednie urządzenie i zasobnik umożliwia także pobranie próbek badawczych do oceny stopnia zanieczyszczeń pyłowych, pochodzących z indywidualnych systemów grzewczych oraz zanieczyszczeń komunikacyjnych. Dane pochodzące z czujników pokładowych są przesyłane do telefonów komórkowych z systemem Android, w których mogą być wyświetlane on-line. Podczas lotu samolot co 2 sekundy rejestruje pozycję GPS, wysokość, temperaturę, wilgotność oraz wszelkie chemikalia, które są monitorowane. Na fotografii 2. ukazano system Scentroid DR1000.

Fot. 2. System do badania zanieczyszczeń powietrza Scentroid DR 1000
Villa i jego zespół [2] zajmowali się walidacją systemu opartego na UAV zdolnego do pomiaru: CO2, CO i NO2. Ładunek gazu obejmował 3 czujniki gazu Alphasense i jeden czujnik SprintIR CO2. Czujniki Alphasense to ogniwa elektrochemiczne działające w trybie amperometrycznym i generujące prąd, który jest proporcjonalny liniowo do ułamka objętości mierzonego gazu. Służą one do pomiaru CO, NO i NO2. Czujniki SprintIR CO2 do pomiarów stężenia CO2 opierają się na technologii bezdyspersyjnej podczerwieni (NDIR). Na fotografii 3. został przedstawiony ten system czujników.
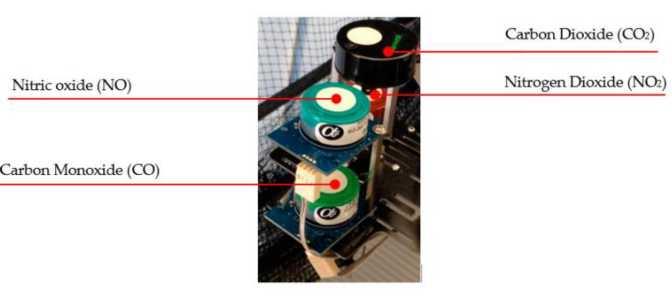
Fot. 3. System czujników do pomiaru: CO2, CO, NO2 i NO
Zaprezentowany system czujników zamontowany na UAV (fot. 3) zawierał interfejs kontroli naziemnej do wizualizacji i przechowywania danych wysyłanych przez czujniki pokładowe w czasie rzeczywistym. Testy przeprowadzono w laboratorium (hangar lotniczy). Sprawdzono funkcjonalność pokładowych czujników, oceniono prędkość strumieni powietrza wytwarzanych przez śmigła drona oraz najkorzystniejszą lokalizację miejsca montażu czujników poprzez pomiar gazu i cząstek smugi emitowanej przez olej napędowy. Czujniki zamontowano na wysięgnikach, aby uniknąć skutków turbulencji i efektu mieszania powietrza przez śmigła drona. Wysięgniki mogły zbierać powyżej lub nawet poniżej niego, używając do tych pozycji przegubu. Maksymalną odległość od śmigieł, gdzie czujniki można było zamontować, ograniczono do 1200 mm, aby utrzymać równowagę UAV bez potrzeby montowania przeciwwagi na drugim końcu. Dodatkowo na system składały się 4 znaczniki podczerwieni (Infrared detection markers), które zostały umieszczone na UAV, aby zarejestrować jego pozycję. Wstępnie wyznaczono mapę prędkości powietrza generowanego przez dron, a następnie skupiono się na analizie skuteczności systemu detekcji zanieczyszczeń. Obserwowano parametry wpływające na pomiar: pracę śmigła (włączone/wyłączone), różną pozycję czujników oraz ich odległość od drona. Uzyskane wyniki w postaci mapy prędkości powietrza potwierdziły, że montaż czujników jest najkorzystniejszy w odległości 100-1200 mm.
Kolejne badania Villa i zespół [8] przeprowadzili w warunkach rzeczywistych. Tylko niektóre z publikowanych przez nich prac prezentują wyniki uzyskane z badań w środowisku docelowym pracy drona [9-12], inne skupiają się na testach laboratoryjnych i modelowaniu matematycznym. Praca Villa dotyczyła automatycznego śledzenia źródeł zanieczyszczeń
w obszarze docelowym oraz dynamicznego kreślenia mapy zanieczyszczenia otaczającego regionu. Pollution-driven UAV Control (PdUC) następuje w dwóch etapach – wyszukiwania, podczas którego rozpoznaje obszar w celu ustalenia maksymalnej wartości zanieczyszczenia, oraz eksploracji, polegającej na tym, że UAV bada obszar otoczenia poprzez wykonywanie spiralnych ruchów. Metoda ta jest czasochłonna, a zbyt długie śledzenie zmian może być spowodowane błędami czujnika. Do eliminacji zbędnych pomiarów proponuje się stosowanie algorytmów optymalizacyjnych PdUC [13] i skuteczniejszego PdUC-D (tzw. dyskretyzowana kontrola zanieczyszczeń).
Qijun Gu i in. [12] prowadzili badania za pomocą systemu wyposażonego w dwa czujniki – cząstek stałych (OPC-N2, Alphasense Inc., Essex, UK) oraz gazu NO2 (NO2-B43F, Alphasense Inc., Essex, UK). Sensory – tak jak w większości przypadków – zostały zamontowane w centralnej części drona. Analizie poddano określone rejony: autostradę, skrzyżowanie na autostradzie, postój ciężarówek i przestrzeń nad kominem. Testy prowadzono w deszczowe dni, gdy prędkość wiatru wynosiła poniżej 5 m/s. System do monitorowania zanieczyszczeń z życiem drona przedstawia fotografia 4.

Fot. 4. Dron wyposażony w czujniki cząstek stałych i NO2
Podobne podejście do integracji sensorów z dronem zaprezentowali Noe M. Yungaicela-Naula i jego zespół [14]. Dron z zamontowanymi czujnikami ilustruje fotografia 5. Badacze odnotowywali, że operacje UAV zakłócały prace czujnika elektrochemicznego podczas lotów. Należy podkreślić, że zastosowanie drona do pomiaru zanieczyszczeń powietrza może być skuteczne tylko wtedy, gdy punkt lokalizacji próbnika powietrza jest zoptymalizowany tak, że pobieranie próbek zanieczyszczeń gazowych i cząstek stałych odbywa się przed wirnikami drona, aby nie dochodziło do mieszania się lub rozpraszania powietrza, które może być odchylane przez działanie wirników [14,15]. Kolejne prace będą obejmowały badanie sposobu osłony czujników pokładowych przed zakłóceniami elektronicznymi.

Fot. 5. Dron do pomiaru zanieczyszczeń z zamontowanymi czujnikami autorstwa Noe M. Yungaicela i zespół
Inne podejście prezentują Yuzhe Yang i jego zespół [16], którzy zamontowali czujniki w perforowanym pudełku na spodniej stronie drona. Konstrukcja drona została przedstawiona na fotografii 6.

Fot. 6. System pomiarowy zanieczyszczeń powietrza z wykorzystaniem drona autorstwa Yuzhe Yang i zespoł
W reakcji na zakłócenia przepływu powietrza zaczęto poszukiwać (oprócz rozwiązań konstrukcyjnych i optymalnej lokalizacji czujników) takich czujników, dla których wpływ tego czynnika był najmniejszy. Zespoły Maurizzio Rossiego [17,18] oraz Aleksei Shaposhnik [19] analizowali zastosowanie wieloparametrycznych czujników półprzewodnikowych MOX (Metal Oxide) do detekcji gazów zamontowanych na pokładzie UAV. Z przeprowadzonych badań wynika, że system jest stabilny i nie osłabia go wpływ ruchu powietrza podczas lotu drona. Czujnik przedstawia fotografia 7.
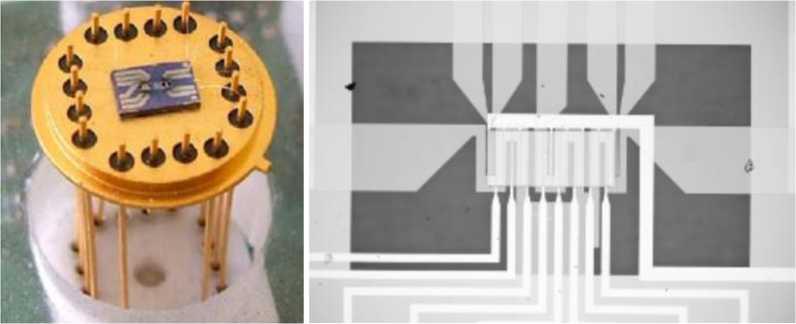
Fot. 7. Wieloparametryczny czujnik gazu – MOX; matryca czujnika pozwalająca na analizę 8 komponentów jednocześnie
W pracy [MPR1] Aleksei Shaposhnik [19] potwierdzono skuteczność czujnika, którego wykrywalność gazów była na wysokim poziomie, wyższym od innych. Stabilność czujników MOX podważyli Javier Burgues i Santiago Marco [20], twierdząc, że wszelkie turbulencje wywołane przez śruby napędowe lub niewielkie zmiany temperatury otoczenia lub wilgotności mogą zakłócać pomiar (utrudniają odróżnienie reakcji na gaz od hałasu). Wpływem temperatury na czujniki MOX zajmował się Shaposhnik [19]. Specyfika działania oparta na zmianach oporu elektrycznego uzasadnia zmiany odczytu, ponieważ opór materiału półprzewodnikowego – jak również chemisorpcja tlenu i innych składników analizowanego powietrza – są zależne od temperatury.
Wcześniej przypuszczano, że pomiar wielu substancji chemicznych można realizować przez budowanie multisensorów (zestawy czujników, z których każdy reaguje na dany czynnik). Jednak błąd jednego czujnika wpływał na pracę innych. Obecnie skupiono się na możliwości przeprowadzenia selektywnej analizy gazu przy użyciu tylko jednego lub dwóch czujników [19]. Ponadto wywnioskowano, że idealna detekcja gazów w warunkach rzeczywistych z użyciem czujników powinna charakteryzować się odpowiednią czułością, krótkim czasem reakcji i selektywnością oraz stabilnością wobec czynników zewnętrznych.
Tendencje rozwojowe dronów wiążą się z miniaturyzacją. Nano-drony mają potencjał do wykonywania zadań polegających na wykrywania gazu w złożonych środowiskach. Najnowsze doniesienia [21] wskazują na korzyści z ich miniaturyzacji m.in. z uwagi na bezpieczeństwo lotów w obszarach miejskich oraz możliwość lotów w trudno dostępnych obszarach. Konstrukcja takiego drona może ważyć nawet 27g. Z uwagi na mały współczynnik kształtu może on być wyposażony w czujniki półprzewodnikowe MOX.
W swojej monografii Bart Custers [22] w rozdziale Future Developments wśród kierunków rozwoju wymienia, oprócz miniaturyzacji, wzrost autonomii dronów. Drony są często postrzegane jako samoloty zdalnego sterowania, ale istnieją technologie umożliwiające autonomiczne operacje, w których zdalne sterowanie przez człowieka jest częściowo lub całkowicie wyeliminowane. Takie oczekiwania sprowadzają się do wykonywania przez drony manewrów omijających, dostoswanych do zmieniających się warunków topograficznych [23], pogodowych czy idąc dalej mogą być wykorzystywane do śledzenia osób [24].
Zaprezentowana metodyka zwana vision-based UAV control architecture opiera się na rozpoznaniu znaku zakodowanego. Jego lokalizacja jest wykorzystywana przez algorytm sterowania do regulacji parametrów lotu UAV, tak aby utrzymać użytkownika w środku pola widzenia. Wykryta plakietka jest dalej analizowana w celu wyodrębnienia kodu wizualnego, który steruje zachowaniem UAV, kontroluje wysokość i odległość UAV względem użytkownika.
W ostatnich latach wkłada się wiele wysiłku w stworzenie autonomicznego drona.
Autonomiczny dron może latać samodzielnie w inteligentny sposób, np. podąża za osobą lub obiektem zainteresowania, unikając przeszkód [25]. Teoria autonomicznego sterowania według Normana Di Paulo to proces składający się z etapów, które ilustrują rysunki 2 i 3.
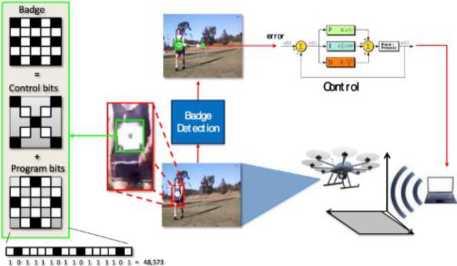
Rys. 2. Przykład projektowania algorytmów sterowania dla bezzałogowych statków powietrznych (UAV)
do śledzenia celu [26]
Self-flying Drone: The basic steps to reach autonomy
|
|
|||
| 1. Drone Footage |
2 Object Detection |
3. Path Plannin | 4. Control |

Rys. 3. Schemat realizacji autonomicznego sterowania dronem według Norman Di Palo
W pracy Francisca Vasconcelos i in. [26] zaproponowano realizację etapu wykrywania obiektów przy wykorzystaniu najnowszych metod głębokiego uczenia się (deep learning). Opisano implementację prostej wersji wykrywania osób i ich śledzenia za pomocą modelu wykrywania obiektów w TensorFlow i Nanonets Machine Learning API. Innym trendem rozwoju, powiązanym z wyżej wymienionym samosterowaniem (self control, self-steering, self flying) jest komunikowanie się i współpraca dronów wykonujących zadanie w grupie (w roju; ang. swarm).
W odpowiedzi na opisane trendy i tendencje rozwojowe technologii dronów powstała idea samonaprowadzającego lotu drona w kierunku celu. W tym przypadku celem jest najwyższe stężenie szkodliwego gazu.
________________________________
[5] Xiao, L. et al. A survey on gas sensing technology. Sensors 2012, No. 12, pp. 9635-9665.
[6] DR1000 FLYING LAB. Drone Based Air Quality Analyzer. www.scentroid.com/scentroid-sampling-drone/.
[7] www.scentroid.com/scentroid-dr1000/.
[8] Villa, T.F. et al. Characterization of the particle emission from a ship operating at sea using an unmanned aerial vehicle. Atmospheric Measure Techniques 2019, No. 12, pp. 691-702. doi: org/10.5194/amt-12-691-2019.
[9] Westerlund, J., Hallquist, M., Hallquist, A.M. Characterization of fleet emissions from ships through multiindividual determination of size-resolved particle emissions in a coastal area. Atmospheric Environment 2015, No. 112, pp. 159-166. doi: org/10.1016/j.atmosenv.2015.04.018.
[10] www.libelium.com/3d-air-quality-modeling-with-sensor-drones-in-greece/. (IWCMC), IEEE, Jun 2017, Valencia, Spain, pp. 2115-2120.
[11] Pajares, G. Overview and current status of remote sensing applications based on unmanned aerial vehicles (uavs). Photogrammetric Engineering & Remote Sensing 2015, No. 81(4), pp. 281-329.
[12] Qijun Gu, Michanowicz D.R., Chunrong Jia. Developing a Modular Unmanned Aerial Vehicle (UAV) Platform for Air Pollution Profiling. Sensors 2018, No. 18. doi:10.3390/s18124363.
[13] Alvear, O. et al. A chemotactic pollution-homing UAV guidance system. 13th International Wireless Communications and Mobile Computing Conference (IWCMC 2017), IEEE, 2017, Valencia, Spain, pp. 2115-2120. doi: ff10.1109/IWCMC.2017.7986610.
[14] Yungaicela-Naula, N.M. et al. Design and Implementation of an UAV-based Platform for Air Pollution Monitoring and Source Identification. Congreso Nacional de Control Automático 2017, Monterrey, Nuevo León, Mexico, 2017.
[15] Velasco, A. et al. A Mobile and Low-Cost System for Environmental Monitoring. Sensors 2016, No. 16, p. 710.
[16] Yuzhe Yang et al. Realtime Profiling of Fine-Grained Air Quality Index Distribution using UAV Sensing. IEEE Internet of Things Journal2018, No. 5(1), pp. 186-198. doi: 10.1109/JIOT.2017.2777820.
[17] Rossi, M. et al. Gas-Drone: Portable gas sensing system on UAVs for gas leakage localization. Sensors 2014, IEEE. doi: 10.1109/ICSENS.2014.6985282.
[18] Rossi, M., Brunelli, D. Autonomous Gas Detection and Mapping With Unmanned Aerial Vehicles. IEEE Transactions on Instrumentation and Measurement 2016, No. 65(4).
[19] Shaposhnik, A. et al. Selective Gas Detection by a Single MOX-Sensor; Eurosensors; Proceedings 2017, No. 1. doi: 10.3390/proceedings1040594.
[20] Burgues, J., Marco, S. Multivariate estimation of the limit of detection by orthogonal partial least squares in temperature-modulated MOX sensors. Analytica Chimica Acta 2018, No. 1019, pp. 49-64.
[21] Burgues J. et al. Smelling Nano Aerial Vehicle for Gas Source Localization and Mapping. Sensors 2019, No. 19. doi: 10.3390/s19030478.
[22] Custers B. et al. The Future of Drone Use. Opportunities and Threats from Ethical and legal Perspectives; Information Technology and Low Series, No. 27, Springer, 2016. doi: org/10.1007/978-94-6265-132-6.
[23] www.interdrone.com/uncategorized/self-driving-drones-navigate-city-streets/.
[24] mwi.usma.edu/era-drone-swarm-coming-need-ready/.
[26] Vasconcelos, F., Vasconcelos, N. Person-following UAVs. Proceedings of IEEE Winter Applications of Computer Vision Conference (WACV), Lake Placid, USA: New York, 2016. online: www.svcl.ucsd.edu/projects/dronefollow
/2016IEEEWACVPersonFollo-ingUAVs.pdf.
|
|
|
|
|
|
|
|