Opracowanie urządzenia do dynamicznego skracania drogi spadania w indywidualnych systemach chroniących przed upadkiem z wysokości
Kierownik projektu:
dr inż. Marcin Jachowicz
Streszczenie projektu:
Celem projektu było podniesienie bezpieczeństwa osób pracujących na wysokości przez opracowanie urządzenia do dynamicznego skracania drogi spadania w indywidualnych systemach chroniących przed upadkiem z wysokości.
W ramach realizacji 3. etapu projektu została opracowana metodyka i stanowisko do badania urządzeń do dynamicznego skracania drogi spadania. Przeprowadzono badania z wykorzystaniem manekina antropomorficznego Hybrydy III, 3 osiowych przetworników przyspieszeń umieszczonych na zewnątrz manekina oraz kamer video dla wybranych warunków początkowych. W badaniach tych wyznaczono przyspieszenia manekina podczas powstrzymywania spadania i przewracania. Na podstawie uzyskanych wyników wyznaczono progowe wartości przyspieszeń charakteryzujących powyższe czynności. Został zaprojektowany i wykonany model urządzenia do dynamicznego skracania drogi spadania, którego schemat ideowy przedstawiono na poniższym rysunku.
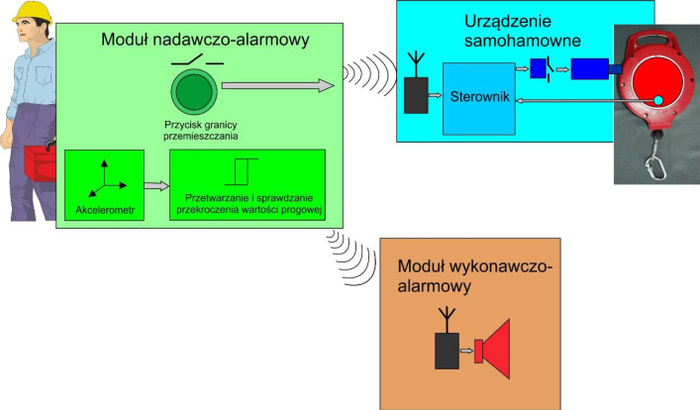
Projekt III.PB.15. Schemat ideowy modelu urządzenia do dynamicznego skracania drogi spadania
Jego główne zadania to skrócenie drogi spadania człowieka lub uniemożliwienie rozpoczęcia spadania oraz powiadomienie osoby nadzorującej pracę o wystąpieniu zdarzenia wypadkowego. Składa się on z następujących modułów:
- nadawczo-alarmowego – bezpośrednio związanego z człowiekiem, zawierającego przetworniki przyspieszenia, programowalny procesor sterujący oraz przycisk osiągnięcia granicy przemieszczania,
- wykonawczo-alarmowego – umieszczonego w miejscu ogólnodostępnym, takim, w którym łatwo jest zidentyfikować jego działanie,
- zmodernizowanego urządzenia samohamownego zintegrowanego z elektronicznym systemem sterowania zbudowanym z wykorzystaniem elementów Arduino.
Moduł nadawczo-alarmowy wraz z pozostałymi elementami realizuje dwa tryby pracy:
- tryb automatycznego wykrywania przeciążenia, który występuje podczas powstrzymywania spadania; ten moduł mierzy wartość powstałego przyspieszenia, porównuje ją z wartością progową wpisaną do pamięci i w razie przekroczenia wysyła sygnał do modułu wykonawczo-alarmowego;
- tryb ograniczenia pola pracy, np. podczas prac na dachu płaskim; aktywacja odbywa się na granicy tego pola, w tym momencie wciśnięcie przycisku granicy przemieszczania powoduje pośrednio zapamiętanie długości wyciągniętej linki urządzenia samohamownego; od tej chwili podczas poruszania się występuje ciągły pomiar tej długości i porównywanie go z wartością zapamiętaną; w przypadku osiągnięcia zapamiętanej wartości następuje wysłanie sygnału do urządzenia sterującego i blokada urządzenia samohamownego.
Przeprowadzono badania sprawdzające, weryfikujące poprawność działania zbudowanego modelu.
W następnej kolejności, uwzględniając uzyskane wcześniej wyniki, opracowano projekt i wykonano prototyp urządzenia do dynamicznego skracania drogi spadania. Jego budowa oparta jest na bazie urządzenia samohamownego zintegrowanego z systemem elektronicznym. Urządzenie samohamowne przyłączone jest z jednej strony do punktu kotwiczenia, a z drugiej za pomocą linki z szelkami bezpieczeństwa. Jego działanie jest realizowane dzięki dostarczeniu do niego energii uzyskanej podczas spadania człowieka. Wówczas wysuwająca się z niego linka powoduje obracanie się bębna, na który jest nawinięta, rozchylenie zapadek blokujących, zatrzymanie mechanizmu i powstrzymanie spadania.
Główne podzespoły opracowanego i zintegrowanego z urządzeniem samohamownym systemu elektronicznego to programowalny mikrokontroler, serwomechanizmy z wysuwanymi trzpieniami oraz fotosensory, dzięki którym możliwe jest dekodowanie zwijania i rozwijania liny z bębna urządzenia. Blokowanie wysunięcia linki z wykorzystaniem tego systemu następuje wskutek uruchomienia 2 serwomechanizmów z trzpieniami, które aktywują wbudowane, oryginalne zapadki urządzenia samohamownego. Uproszczony schemat blokowy systemu oraz opracowany prototyp przedstawiano na poniższych rysunkach.
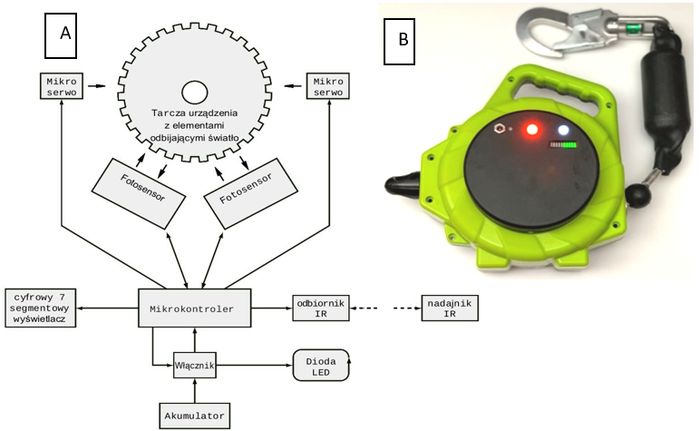
Projekt III.PB.15. Schemat blokowy elektronicznego systemu sterowania urządzeniem samohamownym (A) oraz opracowany prototyp (B)
Opracowany elektroniczno-mechaniczny system blokowania w urządzeniu samohamownym pozwala na dynamiczne, niezależne od zewnętrznej energii generowanej podczas spadania człowieka jego uruchomienie. Dzięki takiej budowie możliwe jest:
- zmniejszenie drogi swobodnego spadania, a więc i sił działających na człowieka podczas powstrzymywania spadania,
- praca urządzenia samohamownego w pozycji poziomej lub zbliżonej do poziomu i jego wykorzystanie jako urządzenia zapobiegającego rozpoczęciu spadania.
Przeprowadzono badania laboratoryjne wersji przedprototypowej, weryfikujące przyjęte założenia projektowe oraz badania użytkowe (z wykorzystaniem opracowanego formularza ankiety) sprawdzające poprawność działania prototypu. Przygotowano i zgłoszono do Urzędu Patentowego RP zastrzeżenie wzoru użytkowego oraz opracowano materiały informacyjne dotyczące urządzeń do dynamicznego skracania drogi spadania, które także poddano weryfikacji (zamieszczonych na stronie internetowej CIOP-PIB).
W ramach realizacji 3. etapu projektu opracowano dokumentację techniczną, a także zgłoszono patent dotyczący urządzenia samohamownego (zgłoszenie nr P.443 045).
Wyniki projektu przedstawiono w 2 publikacjach naukowych.
Jednostka:
Pracownia Ochron Głowy i Sprzętu Zabezpieczającego Przed Upadkiem Z Wysokości
Okres realizacji:
01.01.2020
– 31.12.2022