-

Wykorzystanie dronów w badaniach powietrza - Wprowadzenie -
System pomiarowy wykorzystujący DRON do pomiaru punktowego gazów autorstwa Villa i in. -
System do badania zanieczyszczeń powietrza Scentroid DR 1000 i inne -
System wykorzystania DRONÓW w BHP opracowany w CIOP-PIB -
Opis systemu wykorzystania DRONÓW w BHP opracowanego w CIOP-PIB -
Weryfikacja systemu wykorzystania DRONÓW w BHP w warunkach poligonowych -
Automatyczna kontrola lotu DRONA na podstawie gradientu stężeń substancji chemicznych -
Bibliografia

Automatyczna kontrola lotu DRONA na podstawie gradientu stężeń substancji chemicznych
Aplikacja Mission Planner została zainstalowana na komputerze Intel Compute Stick, który jest połączony bezpośrednio z autopilotem Pixhawk za pośrednictwem złącza serial 1. Z modułów Teensy pozostał moduł obliczający, który wysyła dane z czujników do komputera oraz odbiera dane z autopilota m.in. o jego wysokości, pozycji i prędkości. Dane z czujników są przeliczone według odpowiednich wzorów (wyznaczonych na podstawie dokumentacji sensorów oraz własnych testów przeprowadzonych w poprzednim etapie). Z powodu tylko jednego dostępnego wyjścia USB komputera został użyty rozdzielacz USB-HUB pozwalający na podłączenie do 4 urządzeń USB. Program komputerowy automatycznie wybiera to ramię UAV, dla którego rejestrowana jest najwyższa wartość pochodnej stężenie po czasie (dS/dt). Zostaje wybrany numer ramiona i na podstawie jego oraz kursu kompasu zostaje wyznaczony kurs do nowego punktu (fot. 11).

Fot. 11. Schemat działania algorytmu wyznaczającego kolejny punkt trajektorii lotu UAV
KURS = [30 st + (n - 1) * 60 st] + MAG
MAG – kurs kompasu wskazywany na dronie
n – numer ramienia UAV
Na podstawie kursu punktu od UAV i założonej odległości od punktu D zostają wyznaczone współrzędne geograficzne nowego punktu.
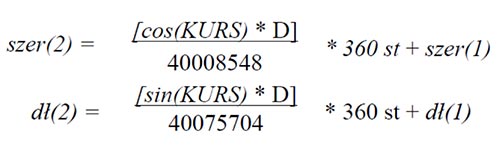
Współrzędne zostają przesłane bezpośrednie z komputera Intel Compute Stick (fot. 12) do autopilota Pixhawk przez port USB UART. Następuje automatyczne włączenie funkcji ,,USTAW WP”, a wtedy UAV zaczyna lot do wskazanego punktu.
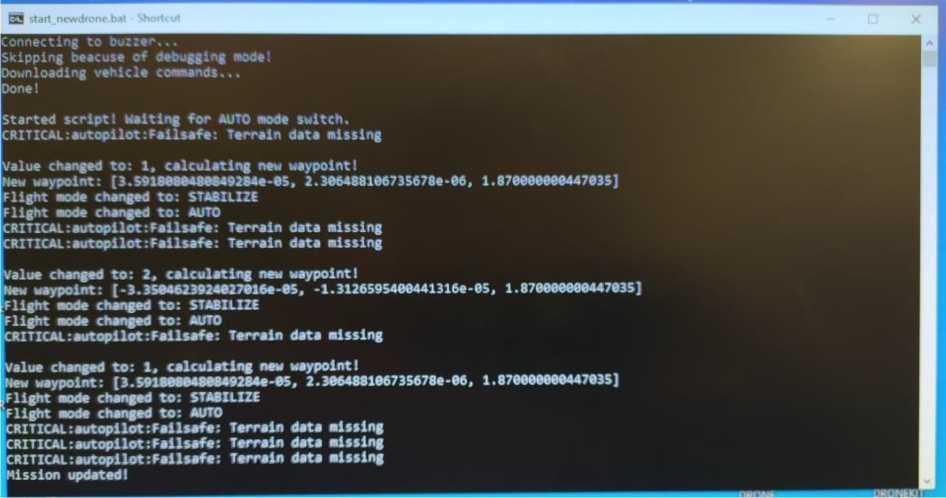
Fot. 12. Okno programu uruchomionego na komputerze zainstalowanym na UAV; program służy do sterowania aplikacją Mission Planner
Przeprowadzone testy wykazały prawidłowe funkcjonowanie zaproponowanego rozwiązania. Do testów automatycznego podążania za źródłem gazu wykorzystano benzynę. Została ona umieszczona w słoiku o pojemności ok. 400 ml na tyczce. UAV podążał za źródłem benzyny z prędkością ok. 3 km/h (fot. 13).

Fot. 13. Automatyczne podążanie UAV za źródłem węglowodorów
|
|
|
|
|
|
|
|