-

Wykorzystanie dronów w badaniach powietrza - Wprowadzenie -
System pomiarowy wykorzystujący DRON do pomiaru punktowego gazów autorstwa Villa i in. -
System do badania zanieczyszczeń powietrza Scentroid DR 1000 i inne -
System wykorzystania DRONÓW w BHP opracowany w CIOP-PIB -
Opis systemu wykorzystania DRONÓW w BHP opracowanego w CIOP-PIB -
Weryfikacja systemu wykorzystania DRONÓW w BHP w warunkach poligonowych -
Automatyczna kontrola lotu DRONA na podstawie gradientu stężeń substancji chemicznych -
Bibliografia

Opis systemu wykorzystania DRONÓW w BHP opracowanego w CIOP-PIB
Statek latający typu UAV dedykowany do detekcji zagrożeń (pomiaru stężeń chemicznych wybranych substancji) powstał na bazie ramy Tarot X6. Zdecydowano się na ten rodzaj ramy w układzie 6 silników (hexacoptera) ze względu na duży udźwig przy stosunkowo małych wymiarach oraz zastosowanie śmigieł o mniejszej średnicy, które powodują mniejsze oddziaływanie strumienia zaśmigłowego na czujniki gazów. Zastosowano śmigła o stosunkowo niewielkiej średnicy – 356 mm. Wybór autopilota Pixhawk 2 został podyktowany dostępnością wielu komponentów kompatybilnych z tym autopilotem oraz dużą liczba różnych interfejsów, w jakie on został wyposażony (Serial, SPI, CAN, I2C, ADC, USB). Umożliwia to dołączenie do toru transmisji danych autopilota danych pomiarowych z 18 czujników zainstalowanych na UAV (dzięki czemu nie jest konieczne dodawanie do systemu dodatkowego nadajnika i odbiornika do bezprzewodowej transmisji danych).
Wykorzystanie wspólnego toru transmisji danych wymagało zaprojektowania, wykonania i oprogramowania dwóch urządzeń. Pierwsze z nich zainstalowane na dronie integruje dane z sensorów i dołącza je do pakietu danych przesyłanych przez wbudowane oprogramowanie autopilota Pixhawk 2. Drugie urządzenie jest podłączone do odbiornika danych i komputera klasy PC. Jego zadaniem jest odseparowanie pakietu danych pomiarowych od danych przesyłanych do oprogramowania sterującego pracą UAV (Mission Planner). Dane pomiarowe są kierowane na port COM, gdzie dalej są odczytywane przez program przesyłający je do bazy danych.
Na każdym ramieniu na wysuwanym wysięgniku zainstalowane są obok siebie trzy różne sensory firmy Figaro (TGS 822, TGS 2602, TGS 2610), dzięki czemu są odsunięte od strumienia zaśmigłowego (fot. 9).

Fot. 9. Bezzałogowy statek latający (UAV) z wysuniętymi ramionami zawierającymi moduły pomiarowe – w trakcie lotu nad poligonem SGSP
Zastosowanie sześciu zestawów sensorów rozwiązuje problem długiego czasu „odtruwania” czujnika, czyli powrotu do stanu, w którym możliwy jest wiarygodny pomiar niższych wartości stężenia wybranych substancji chemicznych. Ponieważ czas reakcji na wyższe stężenia jest stosunkowo krótki, możliwe jest wykonanie trajektorii lotu przeciwnego do gradientu stężenia wybranej substancji chemicznej, czyli w kierunku wykrycia źródła tej substancji. Schemat połączeń uwzględniający numer złączy przedstawia rysunek 4.
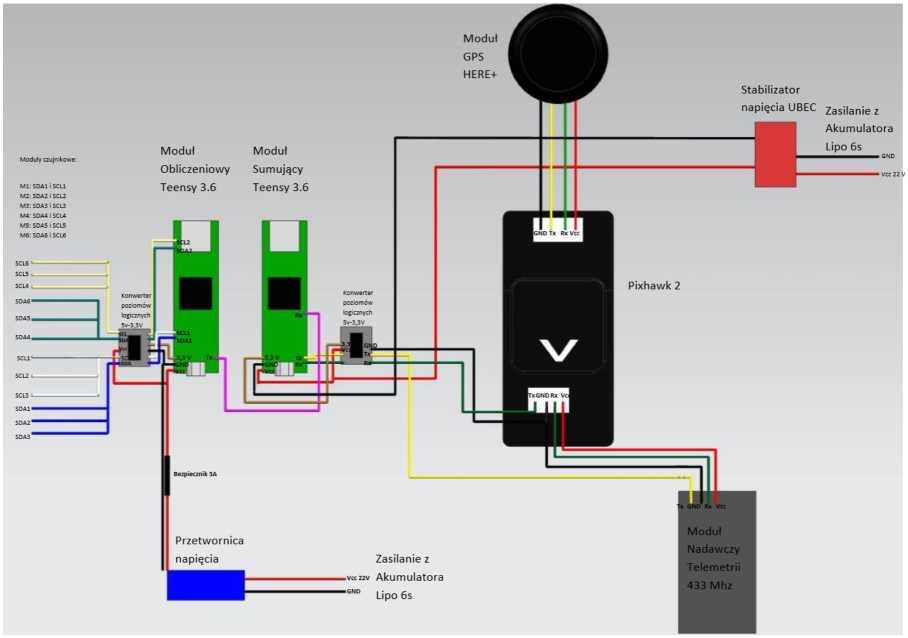
Rys. 4. Schemat połączeń komponentów UAV związanych z rejestracją i przetwarzaniem danych
Umożliwia on odtworzenie zaprojektowanego urządzenia. Dodatkowo UAV wyposażony jest w kamerę termowizyjną. Schemat połączeń związanych z rejestracją obrazu podczerwonego zawiera rys. 5.
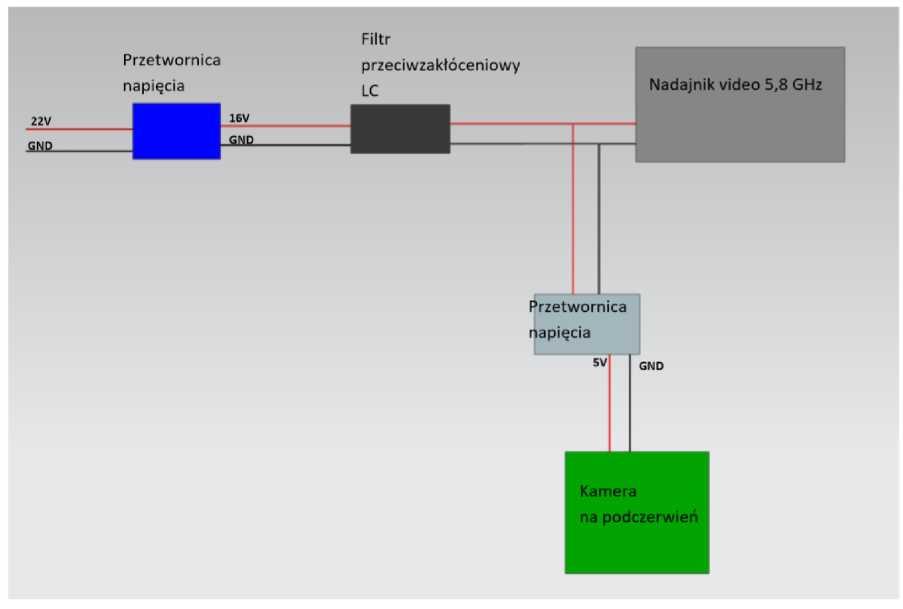 Rys. 5. Schemat połączeń komponentów UAV związanych z rejestracją obrazu wideo
Rys. 5. Schemat połączeń komponentów UAV związanych z rejestracją obrazu wideo
|
|
|
|
|
|
|
|