


2.8 Zalecenia dotyczące prędkości jazdy wózka
2.8.1 Wprowadzenie
Zgodnie z Rozporządzeniem Ministra Gospodarki w sprawie bezpieczeństwa i higieny pracy przy użytkowaniu wózków jezdniowych z napędem silnikowym [2], §7.1, pracodawca powinien określić dopuszczalne prędkości wózków na poszczególnych odcinkach dróg, uwzględniając przy tym nasilenie ruchu, rodzaj przewożonych ładunków, szerokość i stan dróg oraz widoczność. Zgodnie z §7.2 ww. rozporządzenia, pracodawca powinien podjąć środki organizacyjne, zapobiegające wchodzeniu pracowników pieszych na teren pracy wózków. Zaś zgodnie z §7.3 ww. rozporządzenia, w przypadku gdy ze względu na rodzaj wykonywanej pracy nie jest możliwe spełnienie warunków, o których mowa w ustępie 2, pracodawca powinien zastosować odpowiednie środki zabezpieczające pracowników przed skutkami zagrożeń powodujących działaniem wózków. Postanowienie o treści podobnej do treści postanowienia według §7.1, jest zawarte również w Rozporządzeniu Ministra Pracy I Polityki Socjalnej w sprawie ogólnych przepisów bezpieczeństwa i higieny pracy [3]. Wyżej wymienione bardzo ważne i niezbędne w aspekcie bezpieczeństwa wymagania sprawiają większości pracodawcom trudności w ich prawidłowym stosowaniu. Trudności te wynikają z braku wiedzy dotyczącej rzeczywistej prędkości jazdy wózków oraz braku wiedzy dotyczącej np. długości drogi zatrzymania się wózka podczas jazdy z daną prędkością w danych warunkach. W wyniku dochodzi do wielu sytuacji zagrożenia i wielu wypadków – ciężkich i śmiertelnych. Na rysunku 2.41 a) i b) przedstawiono ilustracje sytuacji zagrożenia zarejestrowanych przez kamerę w transporcie wewnątrzzakładowym w Polsce i w USA.

a)

b)
Rys. 2.41 Sytuacje zagrożenia kolizją z wózkiem
a) w jednym z przedsiębiorstw w Polsce b) w jednym z przedsiębiorstw w USA
(fotografia dzięki uprzejmości firmy CISCO-Eagle z USA)
Według danych UDT w Polsce w roku 2011 [17], w sytuacjach podobnych, pięć osób doznało poważnych obrażeń ciała, przy czym w trzech przypadkach w wyniku kolizji wózka z osoba pieszą, a w dwóch – w wyniku kolizji dwóch wózków.
Aby uniknąć kolizji w podobnych sytuacjach zagrożenia, wózek powinien się poruszać z taką prędkością, aby droga zatrzymania wózka była nie większa niż odległość między wózkiem a przeszkodą (np. osobą lub innym wózkiem) pojawiającą się przed wózkiem na jego drodze, przy czym skuteczność hamowania powinna być taka, aby nie nastąpiła utrata stateczności wózka lub spadnięcie przewożonego ładunku. W roku 2013 w CIOP-PIB przeprowadzono badania zachowań kierowców w sytuacjach zagrożenia kolizją wózka z pieszym, z uwzględnieniem różnej prędkości jazdy wózka bez ładunku (według danych z USA [26], kierowcy wózków najczęściej jeżdżą z największymi prędkościami bez ładunku). Badania zostały wykonane z wykorzystaniem symulatora podnośnikowego wózka jezdniowego istniejącego w CIOP-PIB. Na rysunku 2.42 przedstawiono symulator podnośnikowego wózka jezdniowego w CIOP-PIB. Jest to symulator zbudowany w technice rzeczywistości mieszanej, tzn. środowisko, w którym porusza się wózek, jest generowane komputerowo, natomiast wszystkie elementy sterownicze są identyczne jak w podnośnikowym wózku czołowym Still RX 50-20. Na rysunku 2.42 symbolem 1 zaznaczono infohełm operatora, natomiast symbolem 2 – monitor. Obraz w infohełmie jest ten sam jak na monitorze, ale w wersji stereoskopowej. Dźwięk w infohełmie jest w wersji stereofonicznej.
2.8.2 Prędkość wózka a długość drogi zatrzymania wózka
Dane z systemu akwizycji danych symulatora zostały wykorzystywane do obliczeń i analiz, które można znaleźć w sprawozdaniu z realizacji trzeciego etapu projektu 04.A.29. Sprawozdanie jest dostępne w bibliotece w CIOP-PIB. W niniejszym poradniku zawarto jedynie ogólne informacje na ten temat.
Podczas badań z zastosowaniem symulatora określono czas reakcji kierowcy wózka na pojawienie się przeszkody. W badaniach tych, na drogę wózka poruszającego się z określoną prędkością, niespodziewanie dla kierowcy wózka wkracza postać wirtualna. Kierowca wózka zdejmuje stopę z pedału gazu i przenosi ją na pedał hamulca. Zachowanie kierowcy i postaci wirtualnej a także prędkość i czas oraz wszystkie inne wielkości są rejestrowane przez system akwizycji danych symulatora.
W badaniach uczestniczyło 24 kierowców w wieku od 23 do 54 lat, przy czym każdy kierowca uczestniczył w badaniach codziennie przez pięć dni tygodnia. Okazało się, że czas reakcji kierowcy zależy nie tylko od właściwości psychofizycznych kierowcy, jego aktualnych predyspozycji, ale także od wielkości zwanej czasem ryzyka. Czas ryzyka jest to czas, którym dysponuje kierowca od momentu pojawienia przeszkody na drodze wózka, do momentu ewentualnego zderzenia z nią [22]. Zmierzone czasy reakcji kierowców wyniosły od 0,24 s do 1,6 s, przy czym wartości te dotyczą wszystkich uczestników badań i różnych czasów ryzyka.
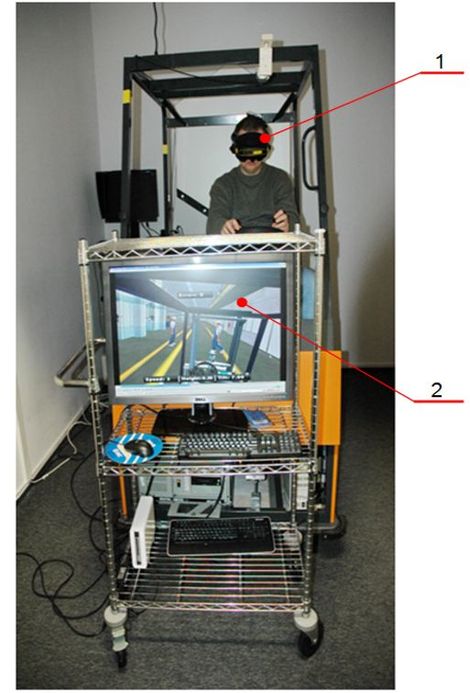
Rys. 2.42. Symulator wózka podnośnikowego stosowany w badaniach w CIOP-PIB
Następnie, korzystając z teorii ruchu pojazdu określono długość drogi zatrzymania Sz wózka średniej wielkości, bez ładunku, podczas jego ruchu z różnymi prędkościami V0. Wyniki zostały przeanalizowane statystycznie metodą Monte Carlo. Metoda Monte-Carlo umożliwia znalezienie rozkładów prawdopodobieństwa danej wielkości przy wykorzystaniu modelu zdeterminowanego. W przeprowadzonych obliczeniach przyjęto, na podstawie doświadczenia w stosowaniu metody Monte Carlo, liczbę iteracji 100 000. Taka liczba powtórzeń obliczeń jest wystarczająca do uzyskania „ustabilizowanych” wartości statystyk opisowych rozkładów (wartość średnia, odchylenie standardowe itp.). Z otrzymanych statystyk, przyjęto do stosowania wartości Sz odpowiadające kwantylowi równemu 0,9, w przypadku każdej wartości prędkości wózka. Wartości te są zawarte w tablicy 2.3. Przyjęte wartości zweryfikowano w sposób obliczeniowy z uwzględnieniem wartości czasu reakcji trk kierowcy. Obliczono składowekażdejdrogi Sz w postaci drogi hamowania Sh i drogi Srk przebytej przez wózek w czasie reakcji trk kierowcy wózka,a następnie obliczono wartości trk, odpowiadające wybranym wartościom Sz Otrzymano wartości trk zawarte w przedziale między 0,96 s a 1 s, co należy uznać za wynik prawidłowy.
Tablica 2.3. Długości drogi zatrzymania wózka bez ładunku przy różnych prędkościach jego ruchu
| V0 (km/h) |
4 | 5 | 6 | 8 | 10 | 12 |
| Sz (m) | 1,6 | 2,0 | 2,5 | 3,4 | 4,3 | 5,3 |
| Sh (m) | 0,47 | 0,61 | 0,77 | 1,10 | 1,48 | 1,90 |
W trzecim wierszu tablicy 2.3 zawarto wartości długości drogi hamowania Sh wózka. Jak widać stanowią one około 30 % drogi zatrzymania wózka – pozostała i największa część drogi Sz jest drogą przebytą przez wózek w czasie reakcji kierowcy.
W tablicy 2.4 zawarto, według danych australijskich [14], długości drogi zatrzymania wózka średniej wielkości z ładunkiem podczas jazdy w warunkach optymalnych i bez spadnięcia ładunku podczas zatrzymywania wózka. Dane australijskie dotyczą prędkości 6 km/h, 8 km/h, 10 km/h i 12 km/h. Wynikają one z badań prowadzonych w Centrum Badań Wypadków Politechniki w Monash (MUARC), w Australii.
Tablica 2.4 Długości drogi zatrzymania wózka z ładunkiem - według badań australijskich
| V0 (km/h) |
6 | 8 | 10 | 12 |
| Sz (m) | 3,2 | 4,6 | 6,2 | 7,9 |
Należy podkreślić, że dane zawarte zarówno w tablicy 2.3 jak i 2.4 dotyczą wózka średniej wielkości z dobrym ogumieniem kół poruszającego się w dobrych warunkach, tzn. po suchej, poziomej i równej nawierzchni.
Porównując dane w tablicach 2.3 i 2.4 można powiedzieć, że w przypadku wózka z ładunkiem długość drogi zatrzymania jest zdecydowanie większa niż wózka bez ładunku, a wraz ze wzrostem prędkości wózka różnica ta zwiększa się. Wynika to głównie stąd, że podczas zatrzymywania zwózka z ładunkiem nie można wykorzystywać maksymalnych możliwości układu hamulcowego, ponieważ grozi to spadnięciem ładunku lub nawet przewróceniem się wózka. Oczywiście powoduje to zwiększenie długości drogi zatrzymania wózka.
W wielu miejscach są potrzebne długości drogi zatrzymania wózka z ładunkiem przy prędkościach 4 km/h i 5 km/h. W przypadku prędkości 4 km/h i 5 km/h, długość drogi zatrzymania wózka średniej wielkości z ładunkiem można przyjąć jak dla wózka bez ładunku, ale zwiększając ją o różnicę 0,7 km/h występującą w przypadku wózka z ładunkiem i bez ładunku przy prędkości 6 km/h (tablice 2.3 i 2.4). W tablicy 2.5 zawarto tak otrzymane długości drogi zatrzymania wózka średniej wielkości z ładunkiem poruszającego się z prędkościami 4 km/h i 5 km/h.
Tablica 2.5. Długości drogi zatrzymania wózka średniej wielkości z ładunkiem przy prędkości 4 km/h i 5 km/h
| V0 (km/h) |
4 | 5 |
| Sz (m) | 2,3 | 2,7 |
Długość drogi zatrzymania wózka zależy od następujących czynników:
- prędkość, z jaką wózek się porusza i czas reakcji kierowcy,
- masa wózka i masa ładunku,
- rodzaj i stan ogumienia kół;
- rodzaj i stan nawierzchni drogi.
Zaleca się uwzględnienie danych dotyczących długości drogi zatrzymania wózka przy różnych prędkościach jego jazdy przy ustalaniu maksymalnych dopuszczalnych prędkości na poszczególnych odcinkach dróg, przy wyznaczaniu dróg wózka oraz w innych przypadkach podczas opracowywania organizacji ruchu wózków jezdniowych w transporcie wewnątrzzakładowym. Zaleca się zapoznanie z tymi danymi nie tylko kierowców wózków, ale wszystkie osoby poruszające się w obszarze ruchu wózków w transporcie wewnątrzzakładowym. Znajomość tych danych i praktyczne ich przestrzeganie zarówno w organizacji ruchu w transporcie wewnątrzzakładowym jak i w zachowaniach uczestników tego ruchu umożliwi uniknięcie wielu nieszczęść.
2.8.3 Prędkość jazdy wózka w niektórych szczególnych przypadkach
Poniżej podano kilka zaleceń dotyczących dopuszczalnych maksymalnych prędkości jazdy wózka w niektórych przypadkach. Zalecenia te dotyczą wózka w prawidłowym stanie technicznym łącznie z ogumieniem kół oraz nawierzchni drogi suchej, o normalnej przyczepności, poziomej i równej, tzn. ewentualne pojedyncze nierówności nie wystają bardziej niż 20 mm ponad nawierzchnię drogi. Inne wózki na drodze zachowują odległość od danego wózka równą w przybliżeniu 4 długościom wózka. Oczywiście, jeśli na drodze pojawią się jakieś nieoczekiwane przeszkody, to kierowca danego wózka powinien dostosować prędkość wózka do sytuacji lub nawet powinien wózek zatrzymać.
a) Prędkość jazdy wózka podczas pokonywania zakrętów po łuku o małym promieniu
Według danych UDT w Polsce mamy co roku kilka wypadków śmiertelnych i ciężkich wynikających z nieprawidłowo wykonywanego manewru pokonywania zakrętów. Na przykład w roku 2012 [23] miały miejsce dwa wypadki śmiertelne i dwa bardzo ciężkie. Najczęściej są one spowodowane jazdą z nadmierną prędkością podczas pokonywania zakrętów. Producenci wózków zaczynają wytwarzać wózki wyposażone w układ samoczynnego zmniejszania prędkości podczas jazdy po łuku (więcej informacji na ten temat można znaleźć w rozdziale 3). W przypadku takich wózków należy przestrzegać zaleceń podanych w instrukcji obsługi wózka. Trzeba tylko pamiętać, że zalecenia te dotyczą optymalnych warunków jazdy, tzn. suchej, poziomej i płaskiej nawierzchni drogi oraz dobrego rodzaju i stanu ogumienia kół wózka. W przypadku nawierzchni nie płaskiej i nie poziomej, np. z pochyleniem do odprowadzania wody deszczowej, to nawet prędkość 4 km/h jest za duża. Podobnie pojedyncze nierówności o wysokości około 20 mm w każdym przypadku wymagają zmniejszenia prędkość nawet do 2,5 km/h.
Zalecenia dostawców wózków dotyczące zalecanych prędkości podczas zakrętu mogą być niejednoznaczne, a nieraz ich wogóle nie ma. Wtedy zaleca się przestrzeganie wytycznych opracowanych przez Centrum Badania Wypadków Politechniki w Monash w Australii [24]. Zgodnie z tym zaleceniem wózki o średniej wielkości, bez ładunku, podczas pokonywania zakrętów pod kątem 90 stopni nie powinny przekraczać prędkości 8 km/h. Wytycznę tę należy stosować do wszystkich wózków bez ładunku niezależnie od tego czy wózek jest czy nie jest wyposażony w system samoczynnego zmniejszania prędkości podczas jazdy po łuku. Trzeba rownież pamiętać, że wytyczne te dotyczą optymalnych warunków jazdy, tzn. suchej, poziomej i płaskiej nawierzchni drogi oraz dobrego rodzaju i stanu ogumienia kół wózka. W przypadku nawierzchni nie płaskiej i nie poziomej, to nawet prędkość 4 km/h jest za duża. Podobnie nierówności o wysokości około 20 mm w każdym przypadku wymagają zmniejszenia prędkość nawet do 2,5 km/h.
Ponadto, podczas jazdy po łuku nie wolno hamować ani zwiększać prędkości wózka – grozi to przewróceniem się wózka. Podczas dojeżdżania do łuku prędkość nie może przekraczać 8 km/h.
Podczas jazdy z ładunkiem prędkość należy zdecydowanie zmniejszyć w zależności od rodzaju ładunku.
Jeśli jednak nastąpi przewrócenie się wózka podczas pokonywania zakrętu, nie należy z wózka wyskakiwać, ale należy pozostać w kokpicie przypiętym pasami; należy naprężyć ciało naciskając stopami o podłogę a rękami opierając się o elementy kokpitu dociskać plecy do fotela, zaś głowę odchylić w stronę przeciwną do kierunku przewracania się wózka.
Doświadczenie australijskie i amerykańskie dowodzi, że zachowując się w ten sposób kierowca wózka zapewnia sobie możliwość uratowania życia.
b) Prędkość wózka podczas jazdy na prostym odcinku drogi
Podczas jazdy drogą wydzieloną tylko dla wózków i oddzieloną barierami fizycznymi od drogi dla pieszych, to zachowując odległość równą około czterem długościom wózka od najbliższego wózka, dopuszczalna prędkość maksymalna może wynosić 12 km/h.
Jeśli jest to droga oddzielona od drogi dla pieszych za pomocą linii na powierzchni drogi, to dopuszczalna prędkość maksymalna wynosi 5 km/h. 5 km/h jest normalną prędkością z jaką porusza się osoba piesza. Jeśli na drogę wtargnie pieszy, to niezależnie od odległości od wózka miejsca wtargnięcia, kierowca powinien wózek zatrzymać do czasu opuszczenia drogi przez pieszego.
Wytyczne takie są stosowane i przestrzegane w większości stanów USA, a wynikają z zaleceń opracowanych przez ASSE (Amerykańskie Stowarzyszenie Inżynierów Bezpieczeństwa) [25, 26]. W USA i w wielu innych krajach uważa się, że są to prawidłowo opracowane wytyczne i praktycznie nie są one podważane.